#include "Helix.h"
Public Member Functions | |
| Helix (const float phi0, const float d0, const float z0, const float omega, const float tanlambda, const float bField) | |
| Constructor using canonical (LEP-wise) parameterisation. | |
| Helix (const CartesianVector &position, const CartesianVector &momentum, const float charge, const float bField) | |
| Constructor. | |
| StatusCode | GetPointInXY (const float x0, const float y0, const float ax, const float ay, const CartesianVector &referencePoint, CartesianVector &intersectionPoint) const |
| Get helix intersection point with a plane parallel to z axis. The plane is defined by two coordinates in the plane (x0,y0) and a normal vector (ax,ay). | |
| StatusCode | GetPointInXY (const float x0, const float y0, const float ax, const float ay, const CartesianVector &referencePoint, CartesianVector &intersectionPoint, float &genericTime) const |
| Get helix intersection point with a plane parallel to z axis. The plane is defined by two coordinates in the plane (x0,y0) and a normal vector (ax,ay). | |
| StatusCode | GetPointInZ (const float zPlane, const CartesianVector &referencePoint, CartesianVector &intersectionPoint) const |
| Get helix intersection point with a plane perpendicular to z axis. | |
| StatusCode | GetPointInZ (const float zPlane, const CartesianVector &referencePoint, CartesianVector &intersectionPoint, float &genericTime) const |
| Get helix intersection point with a plane perpendicular to z axis. | |
| StatusCode | GetPointOnCircle (const float radius, const CartesianVector &referencePoint, CartesianVector &intersectionPoint) const |
| Get coordinates of helix intersection with cylinder, aligned along z-axis. | |
| StatusCode | GetPointOnCircle (const float radius, const CartesianVector &referencePoint, CartesianVector &intersectionPoint, float &genericTime) const |
| Get coordinates of helix intersection with cylinder, aligned along z-axis. | |
| StatusCode | GetDistanceToPoint (const CartesianVector &point, CartesianVector &distance) const |
| Get distance of the closest approach of helix to an arbitrary point in space. | |
| StatusCode | GetDistanceToPoint (const CartesianVector &point, CartesianVector &distance, float &genericTime) const |
| Get distance of the closest approach of helix to an arbitrary point in space. | |
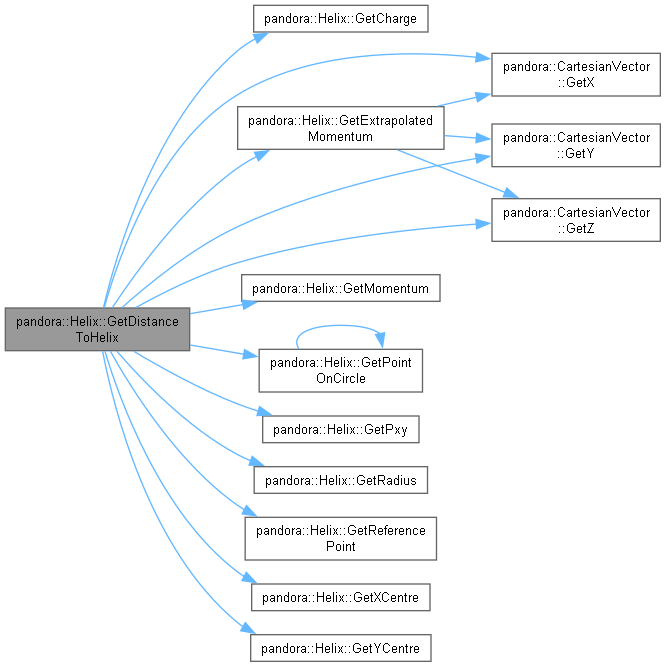
| StatusCode | GetDistanceToHelix (const Helix *const pHelix, CartesianVector &positionOfClosestApproach, CartesianVector &v0momentum, float &helixDistance) const |
| Get distance between two helices. | |
| CartesianVector | GetExtrapolatedMomentum (const CartesianVector &position) const |
| const CartesianVector & | GetMomentum () const |
| Get momentum of particle at the point of closest approach to IP. | |
| const CartesianVector & | GetReferencePoint () const |
| Get reference point of track. | |
| float | GetPhi0 () const |
| Get phi angle of the momentum vector at the point of closest approach to IP. | |
| float | GetD0 () const |
| Get z signed distance of closest approach to IP in the R-Phi plane. | |
| float | GetZ0 () const |
| Get z coordinate of the point of closest approach to IP in the R-Phi plane. | |
| float | GetOmega () const |
| Get signed curvature of the track. | |
| float | GetTanLambda () const |
| Get tangent of dip angle of the track. | |
| float | GetPxy () const |
| Get transverse momentum of the track. | |
| float | GetCharge () const |
| Get charge. | |
| float | GetXCentre () const |
| Get x coordinate of circumference. | |
| float | GetYCentre () const |
| Get y coordinate of circumference. | |
| float | GetRadius () const |
| Get radius of circumference. | |
Private Attributes | |
| CartesianVector | m_referencePoint |
| The coordinates of the reference point. | |
| CartesianVector | m_momentum |
| The momentum vector at reference point. | |
| float | m_phi0 |
| phi0 in canonical parameterization | |
| float | m_d0 |
| d0 in canonical parameterisation | |
| float | m_z0 |
| z0 in canonical parameterisation | |
| float | m_omega |
| signed curvature in canonical parameterisation | |
| float | m_tanLambda |
| tanLambda | |
| float | m_pxy |
| The transverse momentum. | |
| float | m_charge |
| The particle charge. | |
| float | m_xCentre |
| The circle centre x coordinate. | |
| float | m_yCentre |
| The circle centre y coordinate. | |
| float | m_radius |
| The radius of circle in XY plane. | |
| float | m_phiRefPoint |
| Phi w.r.t. (X0, Y0) of circle at reference point. | |
| float | m_phiAtPCA |
| Phi w.r.t. (X0, Y0) of circle at point of closest approach. | |
| float | m_xAtPCA |
| x coordinate at point of closest approach | |
| float | m_yAtPCA |
| y coordinate at point of closest approach | |
| float | m_pxAtPCA |
| Momentum x component at point of closest approach. | |
| float | m_pyAtPCA |
| Momentum y component at point of closest approach. | |
| float | m_phiMomRefPoint |
| Phi of Momentum vector at reference point. | |
Static Private Attributes | |
| static const float | FCT = 2.99792458E-4f |
| static const float | TWO_PI = static_cast<float>(2. * std::acos(-1.0)) |
| static const float | HALF_PI = static_cast<float>(0.5 * std::acos(-1.0)) |
Detailed Description
Constructor & Destructor Documentation
◆ Helix() [1/2]
| pandora::Helix::Helix | ( | const float | phi0, |
| const float | d0, | ||
| const float | z0, | ||
| const float | omega, | ||
| const float | tanlambda, | ||
| const float | bField | ||
| ) |
Constructor using canonical (LEP-wise) parameterisation.
- Parameters
-
phi0 phi angle of momentum vector at the point of closest approach to IP in R-Phi plane d0 signed distance of closest approach in R-Phi plane z0 z coordinate of the point of closest approach to IP in R-Phi plane omega signed curvature tanLambda tangent of dip angle bField magnetic field (in Tesla)
Definition at line 24 of file Helix.cc.
◆ Helix() [2/2]
| pandora::Helix::Helix | ( | const CartesianVector & | position, |
| const CartesianVector & | momentum, | ||
| const float | charge, | ||
| const float | bField | ||
| ) |
Member Function Documentation
◆ GetCharge()
|
inline |

◆ GetD0()
|
inline |
◆ GetDistanceToHelix()
| StatusCode pandora::Helix::GetDistanceToHelix | ( | const Helix *const | pHelix, |
| CartesianVector & | positionOfClosestApproach, | ||
| CartesianVector & | v0momentum, | ||
| float & | helixDistance | ||
| ) | const |
Get distance between two helices.
- Parameters
-
pHelix address of a second helix positionOfClosestApproach to receive position of the point of closest approach v0momentum to receive the v0 momentum helixDistance to receive the distance between the two helices
Definition at line 349 of file Helix.cc.
◆ GetDistanceToPoint() [1/2]
|
inline |
Get distance of the closest approach of helix to an arbitrary point in space.
- Parameters
-
point coordinates of the specified point distance to receive a vector of distances from helix to point in the following projections: x component: distance in R-Phi plane y-component: distance along Z axis z-component: 3D distance magnitude
Definition at line 296 of file Helix.h.
◆ GetDistanceToPoint() [2/2]
| StatusCode pandora::Helix::GetDistanceToPoint | ( | const CartesianVector & | point, |
| CartesianVector & | distance, | ||
| float & | genericTime | ||
| ) | const |
Get distance of the closest approach of helix to an arbitrary point in space.
- Parameters
-
point coordinates of the specified point distance to receive a vector of distances from helix to point in the following projections: x component: distance in R-Phi plane y-component: distance along Z axis z-component: 3D distance magnitude genericTime to receive the generic time (helix length, from reference point to intersection, divided by particle momentum)
Definition at line 298 of file Helix.cc.
◆ GetExtrapolatedMomentum()
| CartesianVector pandora::Helix::GetExtrapolatedMomentum | ( | const CartesianVector & | position | ) | const |

◆ GetMomentum()
|
inline |

◆ GetOmega()
|
inline |
◆ GetPhi0()
|
inline |
◆ GetPointInXY() [1/2]
|
inline |
Get helix intersection point with a plane parallel to z axis. The plane is defined by two coordinates in the plane (x0,y0) and a normal vector (ax,ay).
- Parameters
-
x0 x coordinate in the specified plane y0 y coordinate in the specified plane ax x component of vector normal to specified plane ay y component of vector normal to specified plane referencePoint the reference point of the helix intersectionPoint to receive the coordinates of the intersection point
Definition at line 271 of file Helix.h.

◆ GetPointInXY() [2/2]
| StatusCode pandora::Helix::GetPointInXY | ( | const float | x0, |
| const float | y0, | ||
| const float | ax, | ||
| const float | ay, | ||
| const CartesianVector & | referencePoint, | ||
| CartesianVector & | intersectionPoint, | ||
| float & | genericTime | ||
| ) | const |
Get helix intersection point with a plane parallel to z axis. The plane is defined by two coordinates in the plane (x0,y0) and a normal vector (ax,ay).
- Parameters
-
x0 x coordinate in the specified plane y0 y coordinate in the specified plane ax x component of vector normal to specified plane ay y component of vector normal to specified plane referencePoint the reference point of the helix intersectionPoint to receive the coordinates of the intersection point genericTime to receive the generic time (helix length, from reference point to intersection, divided by particle momentum)
Definition at line 132 of file Helix.cc.
◆ GetPointInZ() [1/2]
|
inline |
Get helix intersection point with a plane perpendicular to z axis.
- Parameters
-
zPlane the z coordinate for the specified plane referencePoint the reference point of the helix intersectionPoint to receive the coordinates of the intersection point
Definition at line 280 of file Helix.h.

◆ GetPointInZ() [2/2]
| StatusCode pandora::Helix::GetPointInZ | ( | const float | zPlane, |
| const CartesianVector & | referencePoint, | ||
| CartesianVector & | intersectionPoint, | ||
| float & | genericTime | ||
| ) | const |
Get helix intersection point with a plane perpendicular to z axis.
- Parameters
-
zPlane the z coordinate for the specified plane referencePoint the reference point of the helix intersectionPoint to receive the coordinates of the intersection point genericTime to receive the generic time (helix length, from reference point to intersection, divided by particle momentum)
Definition at line 204 of file Helix.cc.
◆ GetPointOnCircle() [1/2]
|
inline |
Get coordinates of helix intersection with cylinder, aligned along z-axis.
- Parameters
-
radius the radius of the cylinder referencePoint the reference point of the helix intersectionPoint to receive the coordinates of the intersection point
Definition at line 288 of file Helix.h.

◆ GetPointOnCircle() [2/2]
| StatusCode pandora::Helix::GetPointOnCircle | ( | const float | radius, |
| const CartesianVector & | referencePoint, | ||
| CartesianVector & | intersectionPoint, | ||
| float & | genericTime | ||
| ) | const |
Get coordinates of helix intersection with cylinder, aligned along z-axis.
- Parameters
-
radius the radius of the cylinder referencePoint the reference point of the helix intersectionPoint to receive the coordinates of the intersection point genericTime to receive the generic time (helix length, from reference point to intersection, divided by particle momentum)
Definition at line 222 of file Helix.cc.
◆ GetPxy()
|
inline |

◆ GetRadius()
|
inline |

◆ GetReferencePoint()
|
inline |

◆ GetTanLambda()
|
inline |
◆ GetXCentre()
|
inline |

◆ GetYCentre()
|
inline |

◆ GetZ0()
|
inline |
Member Data Documentation
◆ FCT
|
staticprivate |
◆ HALF_PI
|
staticprivate |
◆ m_charge
◆ m_d0
|
private |
◆ m_momentum
|
private |
◆ m_omega
|
private |
◆ m_phi0
|
private |
◆ m_phiAtPCA
|
private |
◆ m_phiMomRefPoint
|
private |
◆ m_phiRefPoint
|
private |
◆ m_pxAtPCA
|
private |
◆ m_pxy
|
private |
◆ m_pyAtPCA
|
private |
◆ m_radius
|
private |
◆ m_referencePoint
|
private |
◆ m_tanLambda
◆ m_xAtPCA
|
private |
◆ m_xCentre
|
private |
◆ m_yAtPCA
|
private |
◆ m_yCentre
|
private |
◆ m_z0
|
private |
◆ TWO_PI
|
staticprivate |
The documentation for this class was generated from the following files: